
专利号:202111543221X
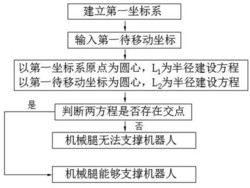
本发明提供一种机器人腿部支撑算法,以第一关节和第二关节的铰接处为圆心,第一关节和第二关节铰接处与第二关节和第三关节铰接处之间的距离为半径、以第三关节末端为圆心,第二关节和第三关节铰接处与第三关节末端之间的距离为半径分别建立方程;通过判断两个方程之间是否有交点从而判断第三关节能否对第二关节进行支撑;若两个方程之间没有交点,则表示第三关节末端移动到第一待移动坐标时,第三关节不能对第二关节进行支撑,进而机械腿不能对机器人进行支撑;若两个方程之间具有一个以上的交点,则表示第三关节末端移动到第一待移动坐标时,第三关节能对第二关节进行支撑,进而机械腿能对机器人进行支撑。