当前位置:首 页 > 服务范围 > G部--物理
专利号:2019103479699
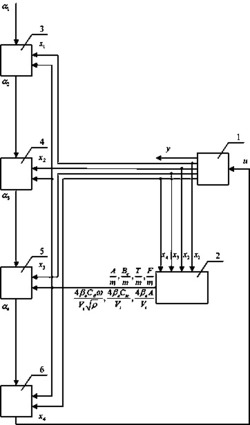
减摇鳍液压伺服模拟实验台反步自适应控制方法包括减摇鳍液压伺服模拟实验台数学模型,自适应参数辨识器,反步子系统控制器1,反步子系统控制器2,反步子系统控制器3,反步子系统控制器4。通过理论分析和半实物实验验证可得,在对减摇鳍实验台液压伺服系统的输出跟踪中,反步自适应控制器具有明显优于常规PID控制器的动态性能和静态性能,跟踪误差相比减小了60%,能够有效地降低液压系统非线性和干扰因素的影响,提高了系统的跟踪控制精确度,符合减摇鳍模拟实验台的控制要求。