
专利号:2021107550375
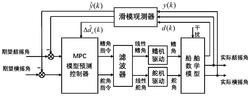
本发明公开一种基于改进模型预测控制抗干扰的舵鳍联合减摇控制系统,旨在解决常规舵鳍联合减摇控制系统存在时变干扰、模型失配和频繁操舵操鳍问题,具体包括以下步骤:构建了考虑时变干扰的离散化三自由度船舶数学模型;以舵角鳍角作为系统输入,设计滑模观测器对干扰和系统输出进行实时观测,并将其反馈给模型预测控制器(MPC);MPC基于扰动增量式数学模型对系统动态输出进行预测,设定期望输出值,将船舶运动控制问题转化为求解二次规划最优解问题,在添加舵角鳍角等约束条件下求解出最优控制律;滤波器对控制律进行高频降噪。本发明观测精度高,减摇效果好,抗扰能力强,避免频繁操舵操鳍引起的执行机构磨损和能源损耗。