
专利号:2021107739705
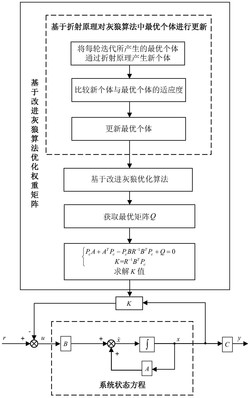
本发明涉及一种改进LQR的船用起重机控制方法,旨在解决传统LQR因不易选取最佳权重矩阵而导致船用起重机作业时减摆效果不佳、响应速度慢的问题,具体步骤如下:首先构建船用起重机负载摆角的动力学模型,将此动力学模型经过线性化处理转化为状态空间方程,然后利用LQR控制方法将负载摆角问题转化为二次型性能指标中权重矩阵参数的优化整定问题,最后基于折射原理改变群体中最优个体的更新机制来改进灰狼优化算法(GWO),用于整定LQR控制器最优权重矩阵,从而获得系统最优性能指标。本发明提高了权重矩阵参数的适应性,对负载的摆角抑制效果好,响应速度快,有效地提高船用起重机吊装作业的工作效率。