
专利号:2022114531513
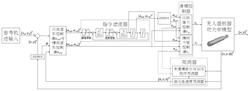
本发明提供一种考虑速度传感器失效的无人潜航器轨迹跟踪控制方法,包括:建立航行数学模型,设定期望轨迹数学模型;设计基于位置信号的速度观测器,在此基础上设计纵向力矩和横向力矩干扰观测器;设计纵向速度和横向速度的虚拟控制律,导入指令滤波器对虚拟控制律的幅值及速度进行约束,并解决对虚拟控制律高阶求导产生计算复杂度增加问题;基于虚拟控制律及指令滤波器的输出设计轨迹跟踪滑模控制器,同时基于干扰观测器的估计值对纵向力矩和横向力矩的扰动进行补偿;本发明的技术方案解决了现有技术方案中未考虑无人潜航器在经过水下作业后速度传感器性能失效,控制器力矩输出超过无人潜航器推进器最大输出而导致控制器跟踪失效的问题。